 |
 |
 |
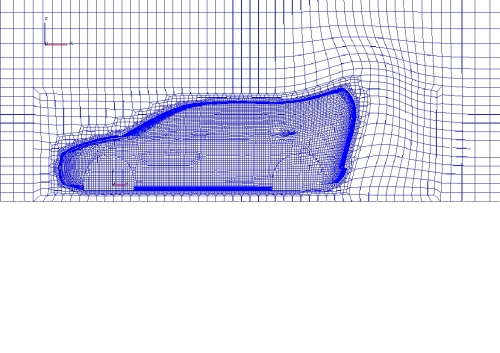 |
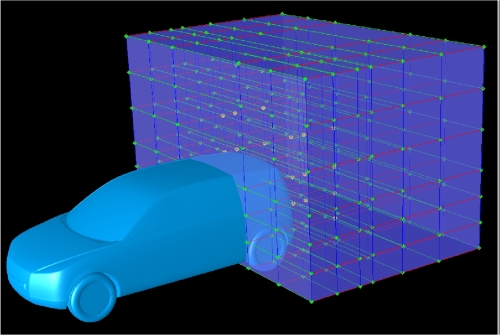
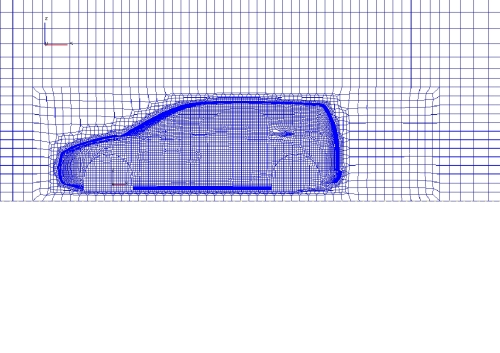
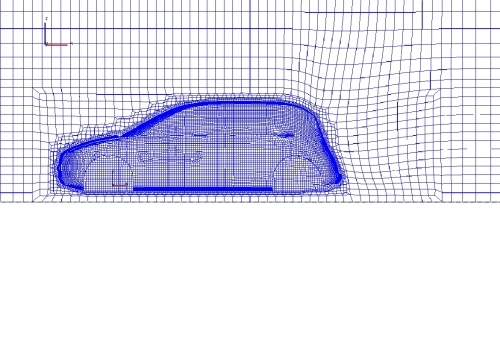
| Shape optimization of the rear of the Volvo car model VRAK.
Volume mesh and three meshes during optimization. |
| Researcher, supervisor: |
Assoc. prof. Sinisa Krajnovic sinisa@chalmers.se |
| MSc students: |
Haukur Elvar Hafsteinsson and Eysteinn Helgason haukur@student.chalmers.se eysteinn@student.chalmers.se |
| Cooperation: | AVL List GmbH, Volvo Cars, Esteco Nordic and Optimal Solutions |
| Publications: | [-] |
| Start of project: | September 2008 |
| End of project: | June 2009 |
BACKGROUND Vehicle aerodynamic optimization is always a multi-objective problem meaning that several objectives such as drag, crosswind stability or aero-acoustic noise must be optimized simultaneously. This requires that compromises are made between objective functions. Improving one objective leads often to deterioration of other and the whole process requires large number of costly experimental and numerical evaluations. Besides, there is no guarantee that an optimal design will be obtained. Another issue is that often several optimal designs are preferred producing a more flexible shape of the vehicle that can easily be adapted to different needs. Thus a rigorous numerical algorithm that is capable of analyzing a design space in a systematic way and providing a design that fulfils specifications is desired. A simple description of the geometry through geometry parameterization is the major obstacle for putting the algorithms using response surfaces in production. The parameterization should not only be precise but also contain small number of design variables in order to decrease the computer effort for construction of response surfaces. Making the optimization process automatic is of highest priority for putting the suggested technique into production. Providing computational grids is the Achilles heel of any such attempt.
The present
project aims to develop an automatic shape optimization procedure for ground vehicles (i.e. road vehicles and trains).
We start with optimization of the Volvo car model VRAK. The first step in our optimization procedure is to make
computational grid in FAME (which is the preprocessor of AVL FIRE). The second step is to perform the CFD simulation using
AVL FIRE. The solution of the simulation will be than provided to ModeFrontier which will suggest the change of the
geometry of the vehicle. This information will be than used by software Sculptor to perform grid morphing and send it back
to AVL FIRE after which the loop will be closed.
REFERENCES |
|
This page should be part of a frames system at www.tfd.chalmers.se/~lada/projects/proind.html by Webmaster: Ingalena Ljungström ilj@flowsim.se |